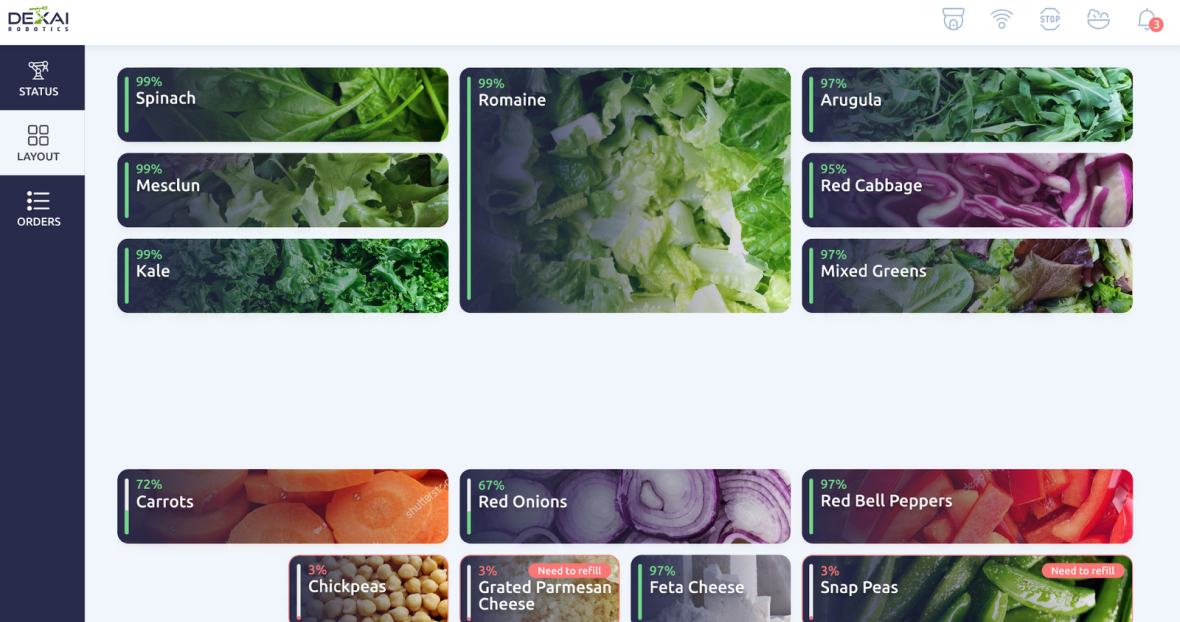
Dexai Robotics: graphical user interface for robot operation
Meet Alfred, an automated robotic arm and your personal sous chef! Alfred was born at Dexai Robotics, while SumatoSoft developed a graphic user interface (GUI) that helps to communicate with the robot!
Project details:
About the Client:
There was a robotic arm named Alfred, but only robotics and software engineers could communicate with it. The Client didn’t have a user-friendly interface that sends commands to the robot or monitors its state. The company planned to sell Alfred to restaurants and reached out to the SumatoSoft team to develop a platform with GUI for interaction between restaurant personnel and multiple robots.
- Client: Dexai Robotics
- Location: Boston, Massachusetts, USA
- Industry: HoReCa / Restaurants & Hotels / Hospitality
- Team size: 1 Project Manager, 1 Account Manager, 1 Designer, 1 Software Architect / Tech Lead, 2 Middle / Senior developers
- Project duration: 2 years
Business challenge
We were expected to build a user interface for communication with Alfred. However, not all restaurant workers are native English speakers. Thus, GUI must be intuitive, informative, and simple so every restaurant worker can understand the current Alfred state or an error just at first sight on the screen.
Additional requirements:
- offline operation;
- built-in user management system;
- robot state and actions monitoring;
- sending commands to robots;
- POS systems integration;
- managing the order queue;
- error/edge cases handling.
Our solution
React JS was chosen as the main technology for the GUI application, and Ruby on Rails was chosen as the backend technology. The main reason behind this decision was that they were well suited for the rapid prototyping and startup environment we worked in. The initial architecture included several microservices with HTTP communication. These microservices were React UI application and Rails backend server, along with a Kitchen Coordinator service written in Python that was responsible for communication with the robotic arm. During the development of the first version, a number of revisions were made both to the requirements and our final solution.
User interface revamp
The most complex part of the application involved adapting to the changing requirements and transitioning from the initial Rails server architecture to a message broker system using RabbitMQ for inter-microservice communication. This allowed for immediate display of robot state changes, command sending, and error handling from the robot side.

Additional features:
- built-in user management system;
- robot state and actions monitoring;
- sending commands to robots;
- error/edge cases handling.

Business value
Before:
- The robotic arm, Alfred, could only be operated by engineers, limiting its practical application in restaurant settings.
- No capability to manage multiple robots simultaneously or integrate with existing POS systems.
- The system required constant internet connectivity, restricting deployment in venues with inconsistent connections.
- The engineer-centric design made investor demonstrations ineffective – Alfred could not be shown as a working restaurant solution.
After:
- Restaurant staff now operate Alfred independently every shift, reducing robot setup time per shift by ~65% compared to the engineer-assisted workflow.
- Multi-robot management and POS system integration enable full restaurant service operations from a single interface.
- The application operates offline with real-time state monitoring, reducing interaction errors by ~50% and ensuring consistent performance across all restaurant environments.
- The intuitive GUI enabled successful investor demonstrations, showcasing Alfred as a commercially ready culinary solution for restaurant-scale deployment.
Video Overview
Have an app idea?
Let’s start with a free quote!
See our other case studies
Platform for vital farm animals signs monitoring


A media buying system for a leading US-based advertising agency








